For this module, I put the dynamics and control principles I had learnt during ealier years into practice as part of a group of three.
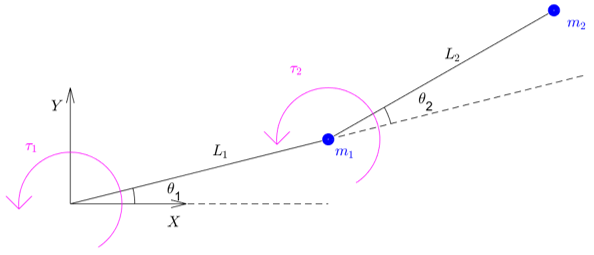
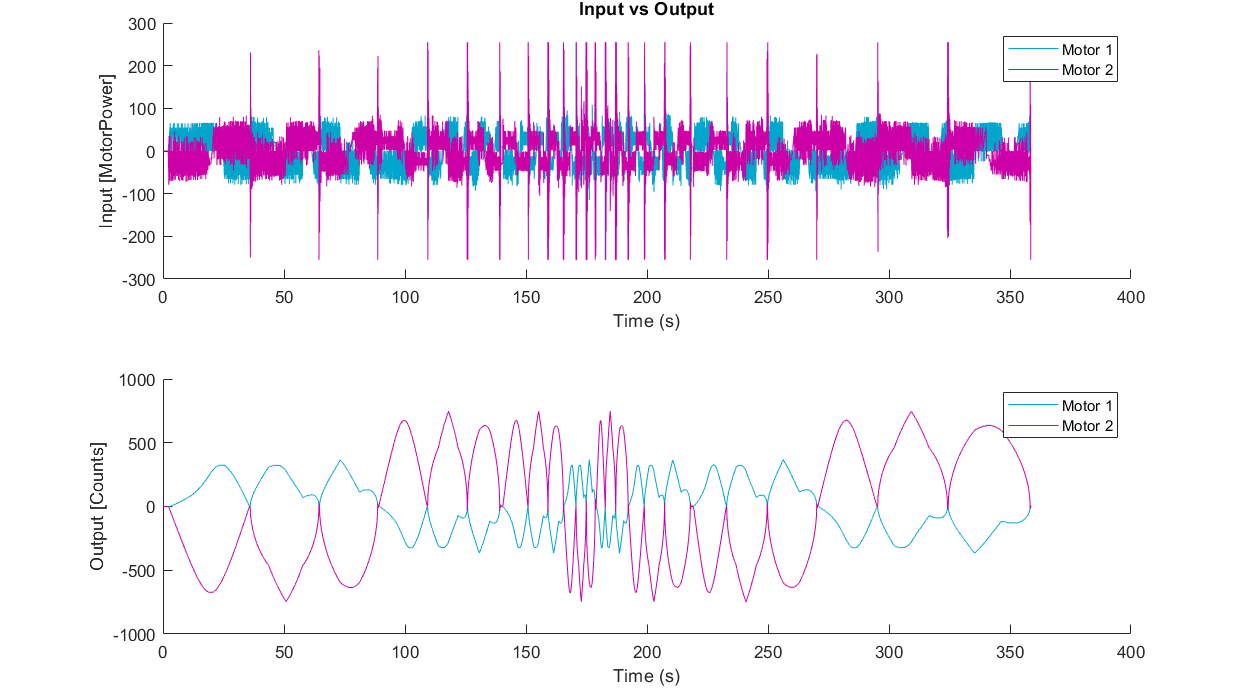
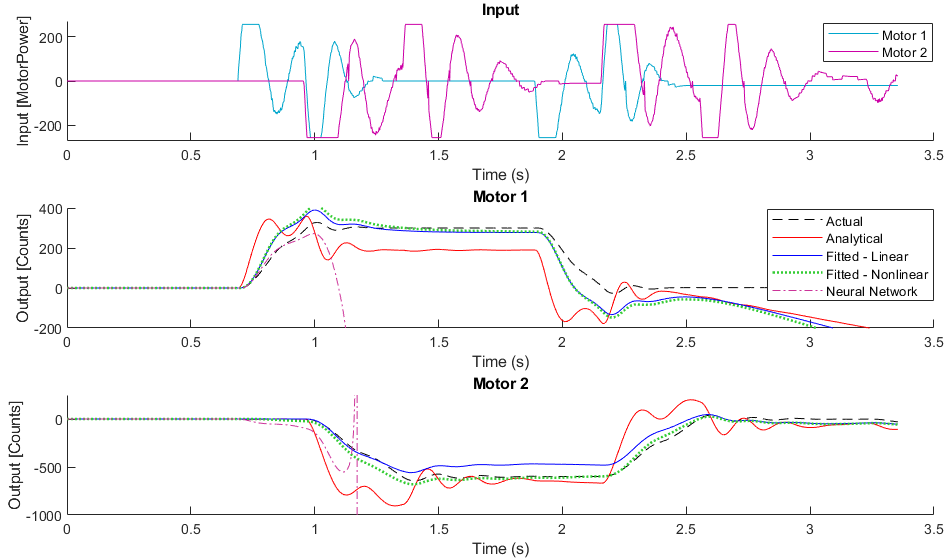
My role involved analytically determining the kinematics and dynamics for the two degree-of-freedom system. Afterwards, the system was identified using the MATLAB function tfestimate from experimental data and compared against the analytical predictions (like in Mechatronic System Design ). The identified plant was then validated against the encoder data for a step input of the robot.
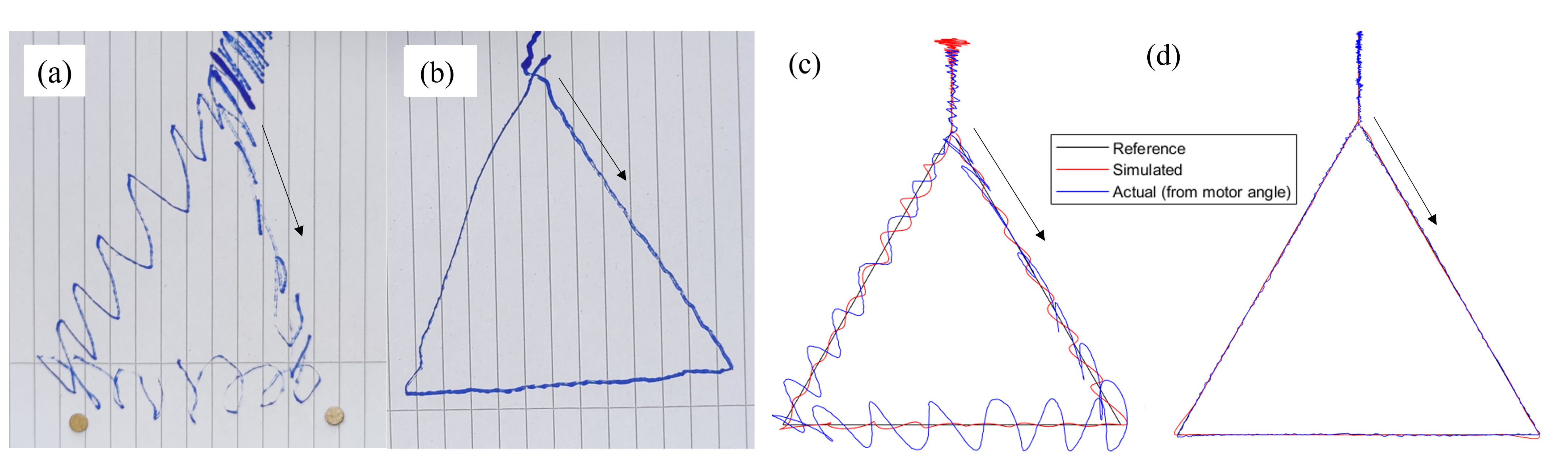
The PID controller was initially tuned based on rule-of-thumb control principles and further tuned using the simulated plant, against accuracy and motor effort metrics. Further optimisation using non-linear PID control was implemented in simulation, but linear PID was deemed accurate enough for implementation on the actual robot due to various real world practicalities not captured in the simulation, i.e. gear backlash.