In this module I learnt about the dynamics of automobiles and effective ways to maintain control. Firstly, I learn about the longitudinal and lateral forces exerted by a tyre during accelerating, braking and cornering and the factors that affect performance such as camber and tyre pressure. I was introduced to different methods of modelling tyres such as Linear, Dugoff and Pacejka tyre models and the limitations with each.
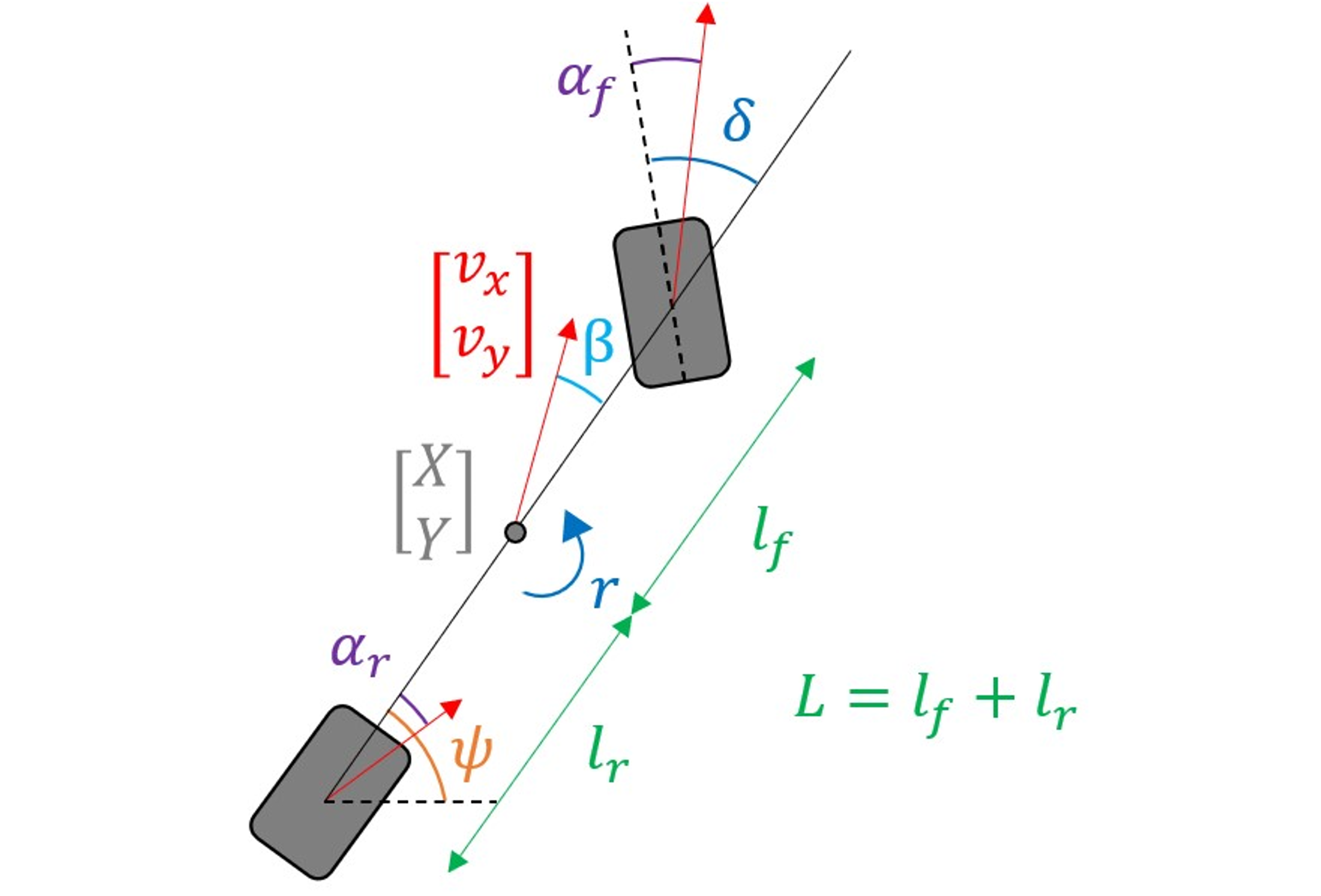
I also learnt about the steering characteristics of vehicles, such as the critical speed for oversteer and the characteristic speed for understeer. I also learnt about how pitch and roll negatively affect the performance of a car and possible methods of mitigating this. Additionally I learnt about suspension dynamics for a quarter-car and half-car model, and the possibility of semi-active suspension (skyhooks and ground hooks) to improve ride quality and handling performance. Finally I learnt about how the different variables in a vehicle are actually measured through the use of sensors.
For the control segment of the course, I first designed two ABS controllers in Simulink, one purely trying to achieve an optimum wheel slip and another also trying to match the wheel and body acceleration (Mixed Slip Deceleration) using a hidden plant model provided by the professor. I then optimised the controller using gain scheduling for different velocities and road friction coefficients and compared the performance of the two controllers.
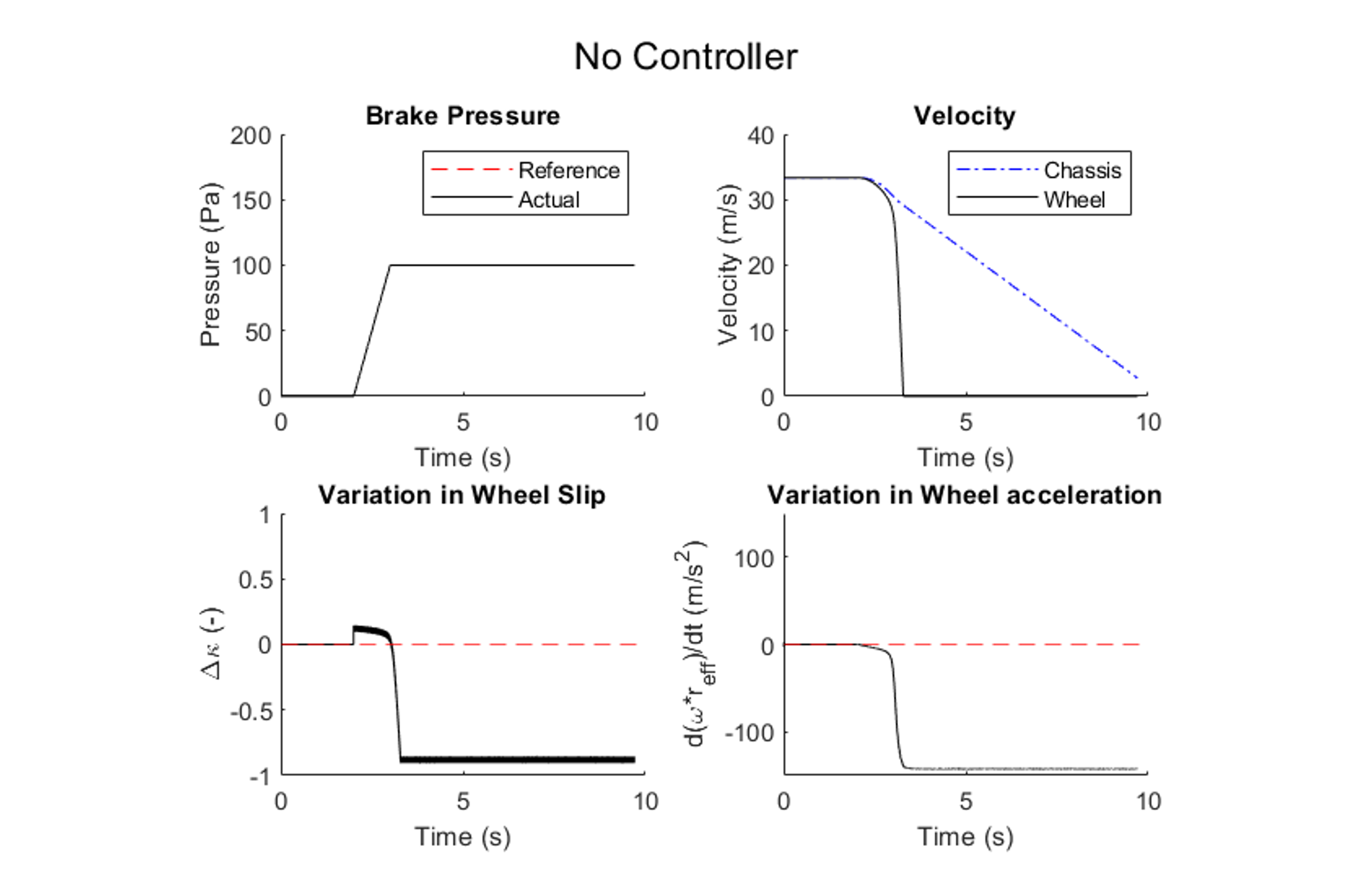
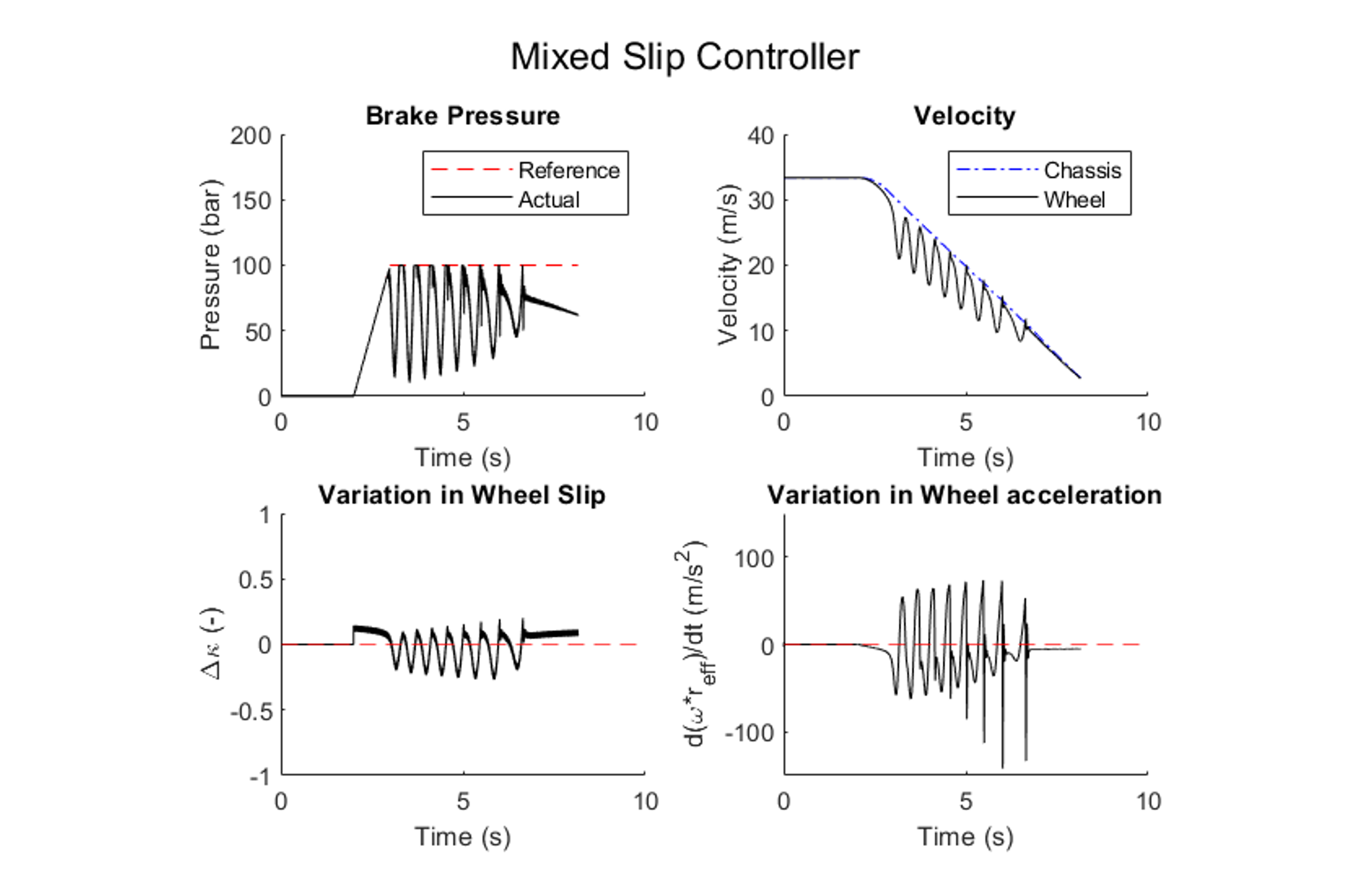
Without a controller, the wheel locks up under emergency braking in slippery conditions (Figure 1: top-right), whereas with the controller the wheel continues to turn (Figure 2: top-right) allowing the driver to maintain lateral control. Also, the wheel slip is kept around the optimum κ = 0.12 (Figure 2: bottom-left) which reduces the total braking distance (Figure 2: top-right).
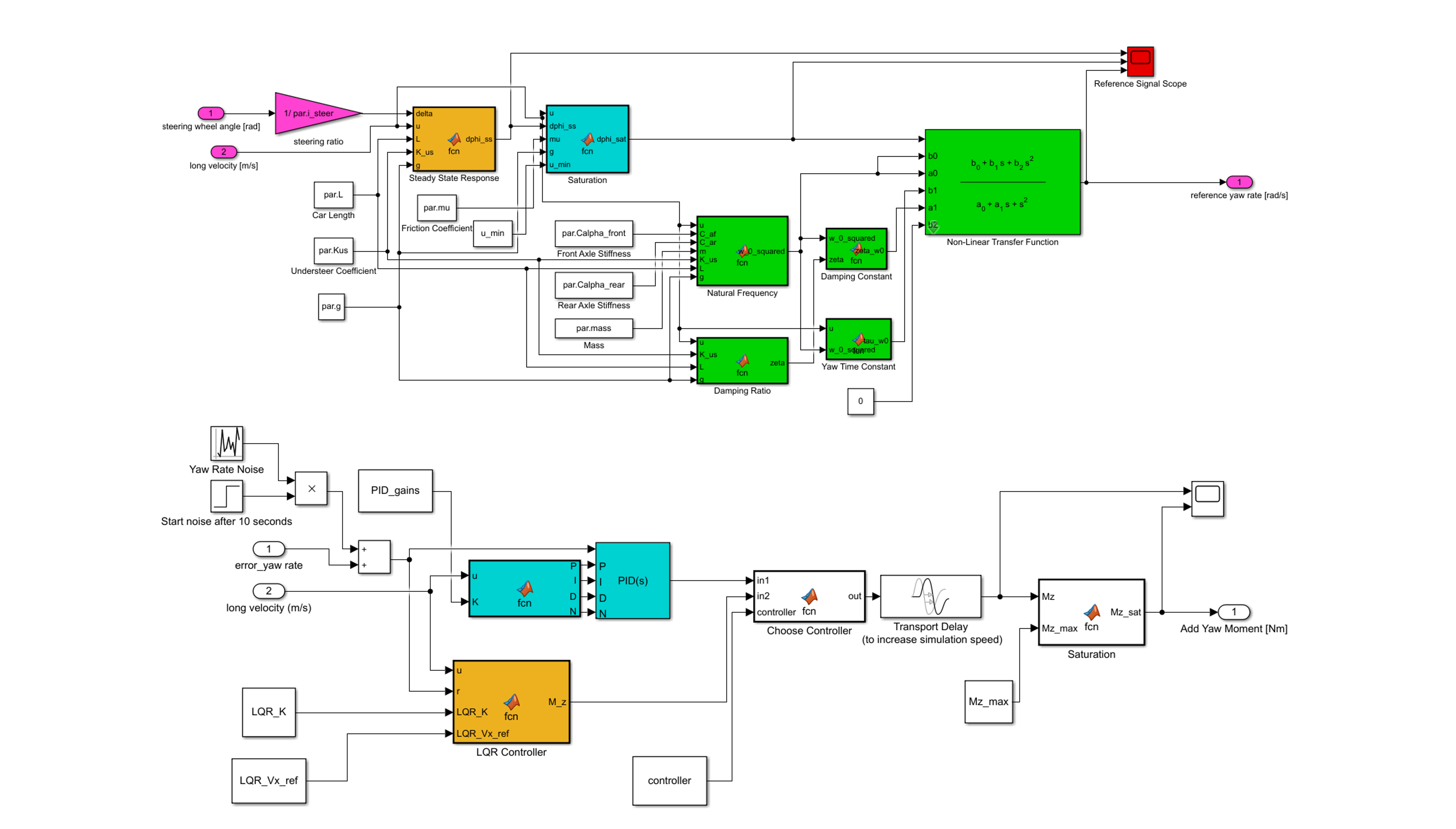
I was also tasked with designing a vehicle stability controller so the vehicle could withstand a given steering input (sine with dwell) without the driver losing control. This involved generating an achievable reference yaw rate from the steering input and optimising a PID and LQR yaw rate controller for this purpose. I also tested the robustness of the controller by adding noise to the system and simulating at multiple speeds.
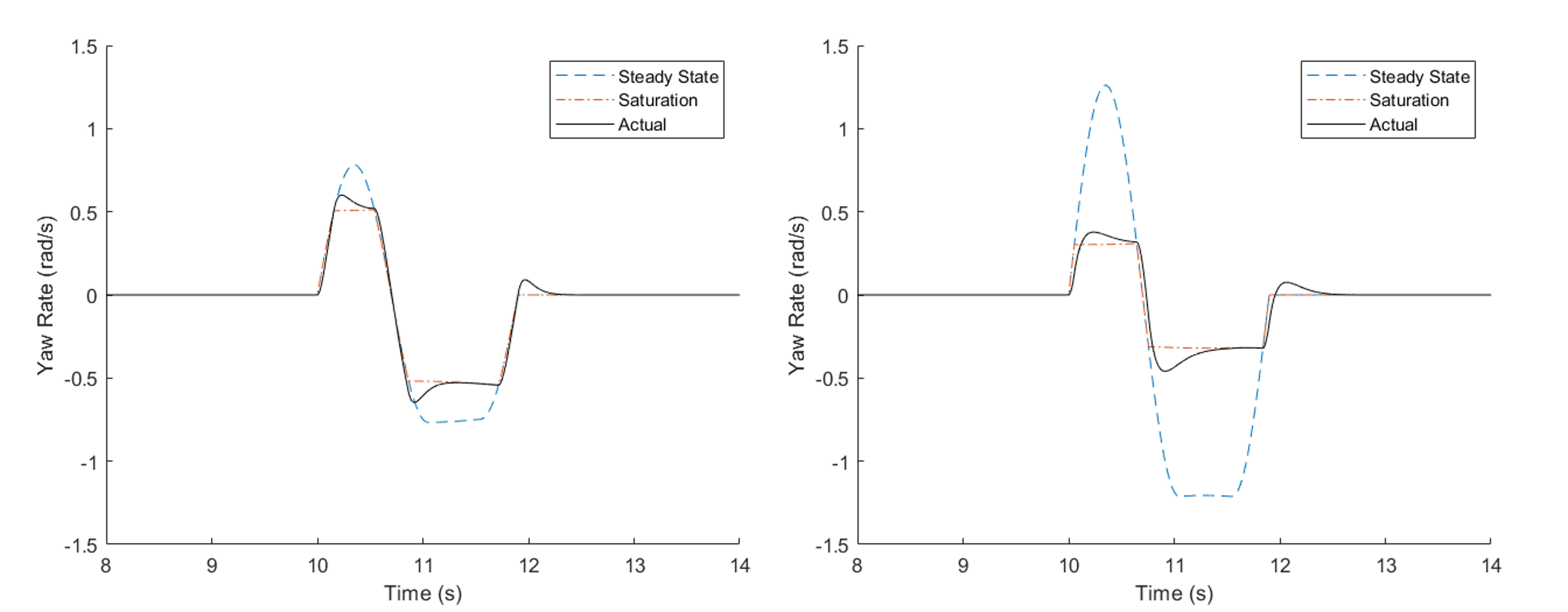
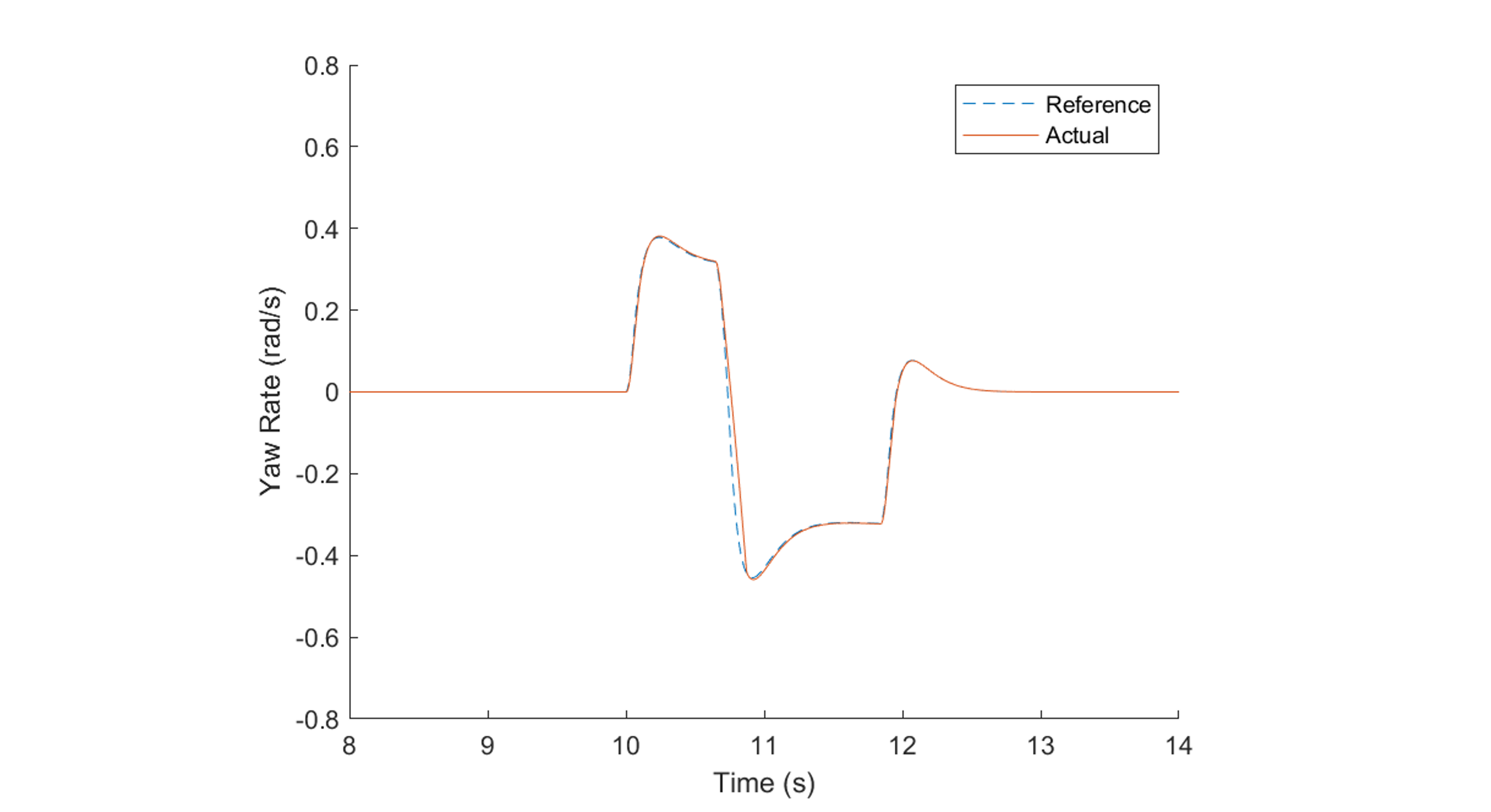
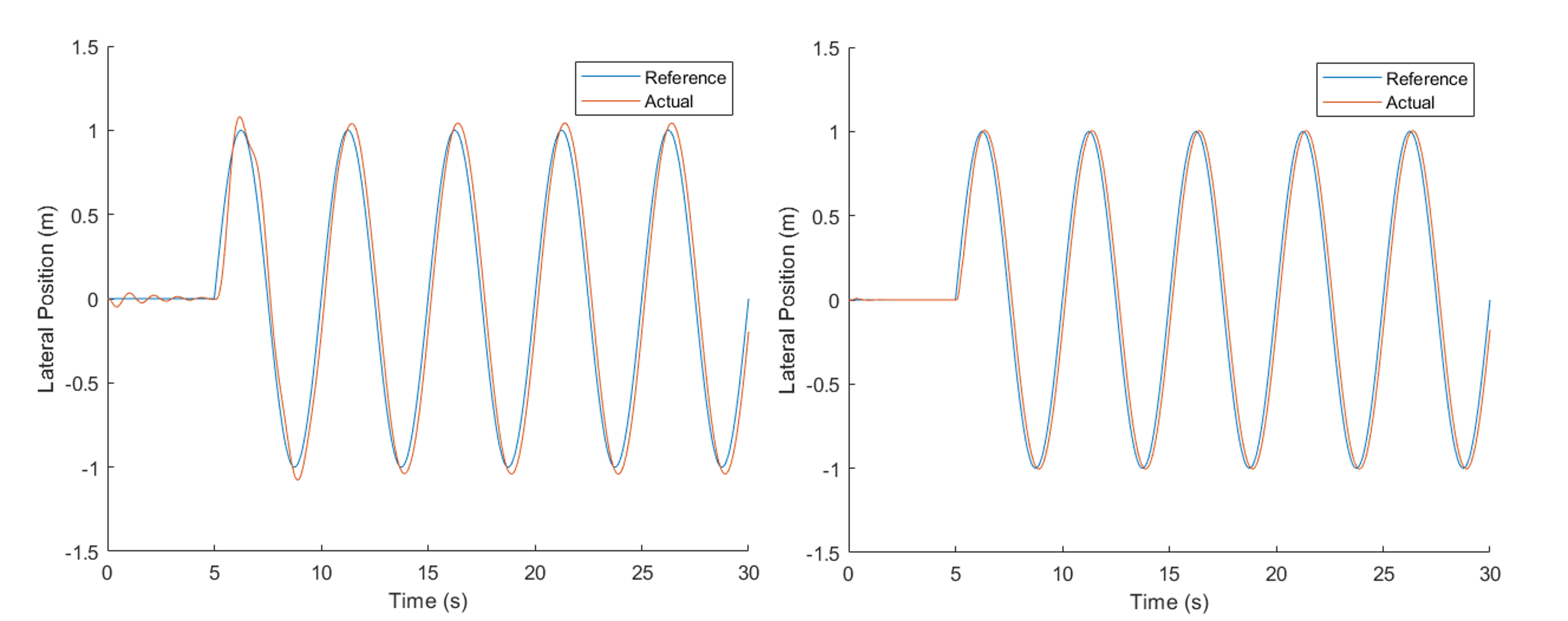
The reference generation is shown in Figure 4, with the original steady-state yaw (i.e. the driver's steering input) saturated to an achievable target. However this causes a discontinuity in the derivative of the yaw rate so it was passed through a 2nd order transfer function to smooth the signal (actual reference). Without a controller, the car becomes unstable and undriveable (Figure 8) whereas with a controller the driver can maintain control (Figure 9).
*Note: "car" not to scale